Showing
- doc/additionalDoc/a-features.h 3 additions, 0 deletionsdoc/additionalDoc/a-features.h
- doc/additionalDoc/codeorg.h 24 additions, 0 deletionsdoc/additionalDoc/codeorg.h
- doc/additionalDoc/e-operators.h 38 additions, 0 deletionsdoc/additionalDoc/e-operators.h
- doc/additionalDoc/feature-doc.h 35 additions, 0 deletionsdoc/additionalDoc/feature-doc.h
- doc/additionalDoc/install-doc.h 64 additions, 0 deletionsdoc/additionalDoc/install-doc.h
- doc/additionalDoc/namespace-doc.h 9 additions, 0 deletionsdoc/additionalDoc/namespace-doc.h
- doc/additionalDoc/package.h 187 additions, 0 deletionsdoc/additionalDoc/package.h
- doc/additionalDoc/parameter-server-doc.h 7 additions, 0 deletionsdoc/additionalDoc/parameter-server-doc.h
- doc/additionalDoc/sot-doc.h 46 additions, 0 deletionsdoc/additionalDoc/sot-doc.h
- doc/footer.html 0 additions, 11 deletionsdoc/footer.html
- doc/header.html 0 additions, 7 deletionsdoc/header.html
- doc/package.css 0 additions, 230 deletionsdoc/package.css
- doc/package.dox.cmake 0 additions, 295 deletionsdoc/package.dox.cmake
- doc/pictures/HRP2.jpg 0 additions, 0 deletionsdoc/pictures/HRP2.jpg
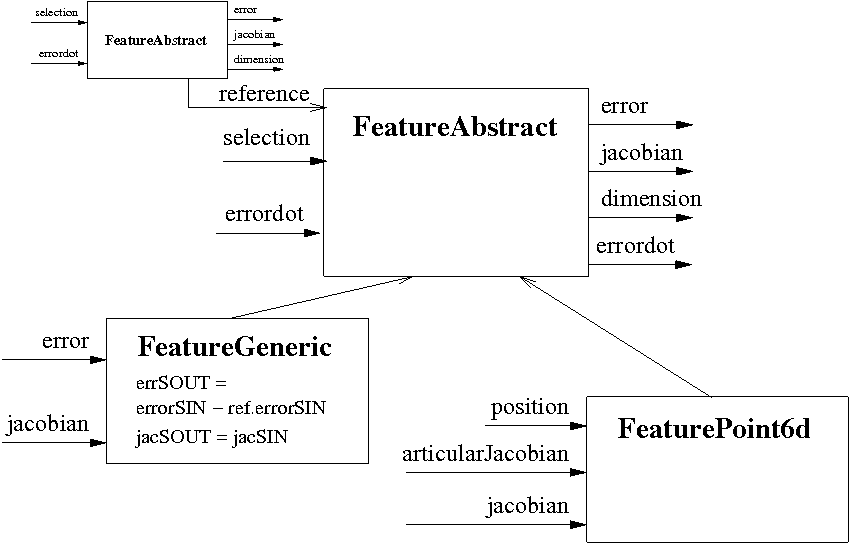
- doc/pictures/feature.fig 114 additions, 0 deletionsdoc/pictures/feature.fig
- doc/pictures/feature.png 0 additions, 0 deletionsdoc/pictures/feature.png
- doc/pictures/footer.jpg 0 additions, 0 deletionsdoc/pictures/footer.jpg
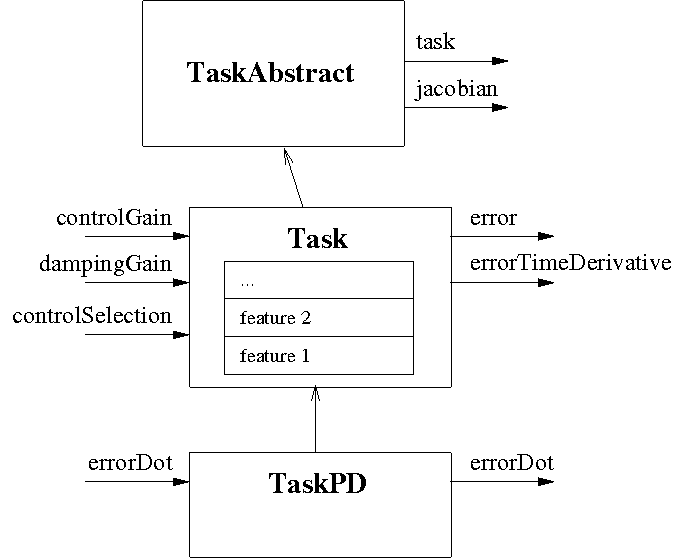
- doc/pictures/task.fig 79 additions, 0 deletionsdoc/pictures/task.fig
- doc/pictures/task.png 0 additions, 0 deletionsdoc/pictures/task.png
- doc/references.bib 11 additions, 0 deletionsdoc/references.bib
doc/additionalDoc/a-features.h
0 → 100644
doc/additionalDoc/codeorg.h
0 → 100644
doc/additionalDoc/e-operators.h
0 → 100644
doc/additionalDoc/feature-doc.h
0 → 100644
doc/additionalDoc/install-doc.h
0 → 100644
doc/additionalDoc/namespace-doc.h
0 → 100644
doc/additionalDoc/package.h
0 → 100644
doc/additionalDoc/parameter-server-doc.h
0 → 100644
doc/additionalDoc/sot-doc.h
0 → 100644
doc/footer.html
deleted
100644 → 0
doc/header.html
deleted
100644 → 0
doc/package.css
deleted
100644 → 0
doc/package.dox.cmake
deleted
100644 → 0
doc/pictures/HRP2.jpg
0 → 100644
{kind=link}

23.1 KiB
doc/pictures/feature.fig
0 → 100644
doc/pictures/feature.png
0 → 100644
{kind=link}
13 KiB
doc/pictures/footer.jpg
0 → 100644
{kind=link}

23.1 KiB
doc/pictures/task.fig
0 → 100644
doc/pictures/task.png
0 → 100644
{kind=link}
9.54 KiB
doc/references.bib
0 → 100644